Проврка оборудования. Motor
1. Визуальный осмотр
Перед подключением убедиться, что нет медных жил и прочего мусора на плате, компоненты припаяны
2. Прошивка оборудования
Актуальные прошивки здесь
3. Напайка и проверка вачдога
Для проверки вачдога необходимо нажать кнопку reset при зажатой кнопке boot. Должен загореться лазер на минуту. Через несколько секунд должен заморгать VD2. (плата подключена к wifi)
4. Проверка подключения платы
Если перед загрузкой платы включить UART, то можно увидеть, за сколько секунд прошло подключение к wifi Laser_maze
 Нормальное время подключения: 4-18 секунд.
Нормальное время подключения: 4-18 секунд.
После подключения плата должна появиться в devices как Moving.
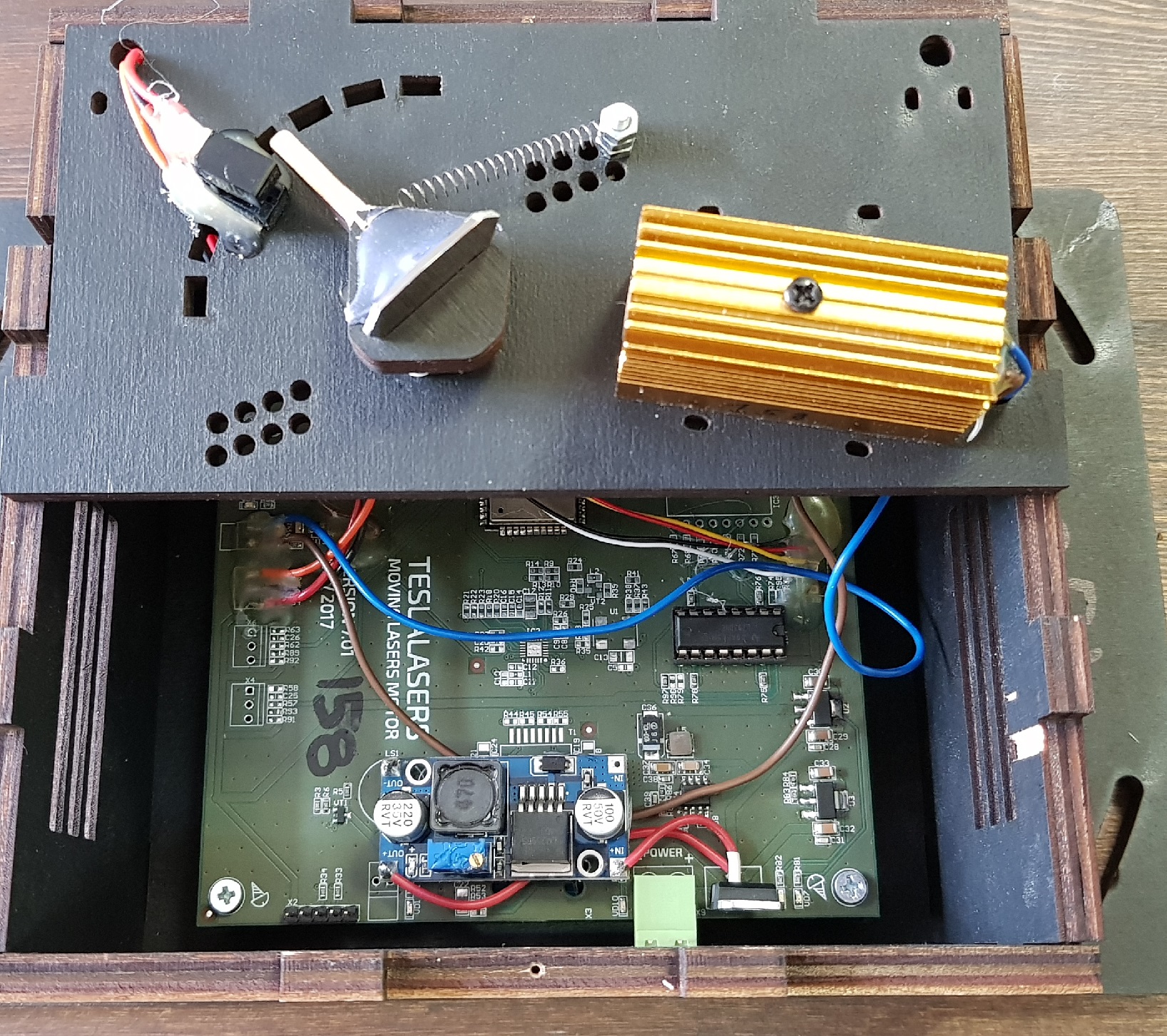
5. Собрать механику
Оптопара должна быть выставлена по уровню и залита термоклеем.
Прижимающая пружина должна быть натянута и зафиксирована.
Лазер должен быть направлен под минимальным углом к оси шаговика.
6. Проверка калибровки ZP
- Подать питание на плату
- Дождаться подключения по WiFi
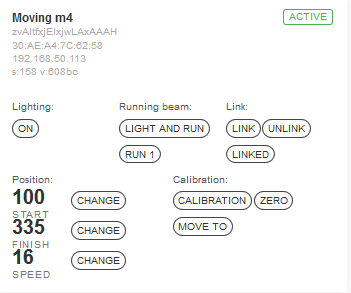
- Зайти в devices
- Функцией “Move To” передвинуть мотор в положение 500
- Установить углы 50-350
- Установить скорость 3
- Перезагрузить плату кнопкой reset
- После подключения по WiFi мотор должен доехать до оптопары, вернуться на небольшой угол и еще раз доехать до оптопары
- После калибровки по оптопаре мотор должен поехать в первый угол и остановиться
7. Проверка базового функционала
- В окне devices включить лазер кнопкой “ON”
- Убедиться, что лазер загорелся и светит в одну точку
- Функцией “Move To”: 3.1. привести его в положение 100 3.2. 10 раз двигать по 1 вправо ( следить, чтобы лазер передвигался на примерно одинаковое расстояние и постоянно в одну сторону, а не съезжал обратно, оставался на месте, или проскакивал) 3.3. 10 раз двигать аналогично влево
- Включить автоматическое движение кнопкой “LIGHT AND RUN”
- Запомнить, в каких углах физически перемещается точка
- Поменять углы на 10-700 (убедиться, что углы изменятся, но при этом не будет срабатываний оптопары или свечения лазера не на поверхность зеркала, а в срез)
- Поменять скорость на 30 на 1 минуту. Убедиться, что физически углы движения не схезжают
- Поменять скорость на 3. Убедиться, что лазер идёт равномерно без рывков и дёрганий.
- Через 11-12 минут убедиться, что лазер сам выключится и мотор остановится.
- Сразу попытаться включить лазер (убедиться, что он не будет включаться ближайшие 30 секунд)
- После этого включить режим “RUN AND LIGHT” и когда лазер будет находиться приблизительно в правом углу запустить калибровку по ZeroPoint
-
Лазер должен погаснуть, в не дольше, чем за 5-7 секнуд скалиброваться по ZP и начать ездить и светить дальше из левого угла со скоростью, установленной в настройках
- Зайти в PRO
- Включить Service Mode
- Убедиться, что лазер начал ездить и светить
- Выключить Service Mode
8. Проверка на съезжание
- Закрепить лазер в корпусе
- Повесить лазер на стенд для проверки
- Подключить питание
- Дождаться загрузки и калибровки по ZP (до 25 секунд)
- В devices установить углы (примерно 150-400) и скорость 8
- Включить сервисный режим
- Сразу провести линию на доске и подписать номер лазера
- Через 16 минут, когда лазер погаснет и будет готов к работе снова включить его.
- Сравнить, насколько съехала линия
Допуски:
- вниз (в сторону платы) - не более 2 см
- вверх - не более 1 см
9. Заливка платы. Сборка в корпус
Залить термоклеем ноги ESP и все места припайки проводов и перемычек. После этого покрыть всю плату лаком.
10. Линковка и проверка перед запаковкой комплекта
Для линковки необходимо:
- Подключить движущийся лазер и плату длинного фотоприемника для него
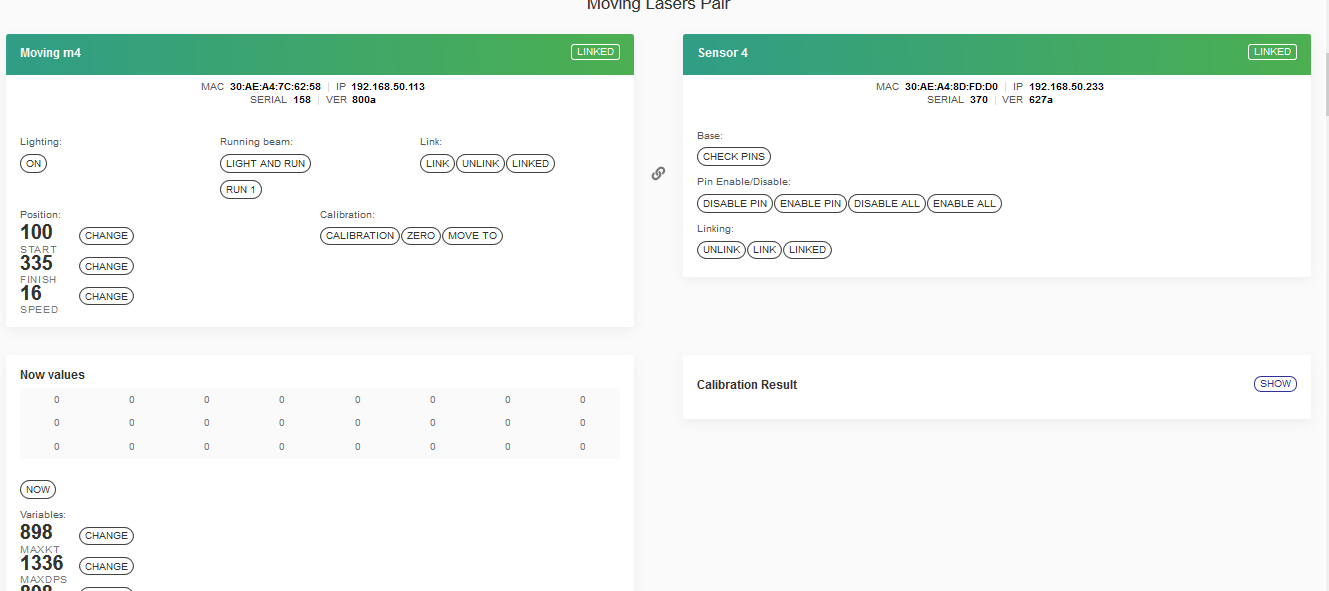
- Зайти в окно devices
- Нажать “Unlink” у лазера и фотоприёмника
- Убедиться, что светодиод VD2 на плате лазера и VD3 на плате фотоприемника мигают с частотой меньше 1Гц.
- Нажать “Linked” у лазера
- Нажать “Linked” у соответствующего фотоприёмника
- Убедиться, что светодиод VD2 на плате лазера и VD3 на плате фотоприемника мигают с частотой около 2Гц.
- В появившемся окне ввести логический номер лазера, в которым линкуем.
- Перезагрузить NodeJS через ssh командой
pm2 restart all - Перезагрузить платы лазера и фотоприемника.
- Обновить страницу devices и убедиться, что они отображаются теперь парой
Posts
subscribe via RSS